Hola de nuevo a todos, seguimos en este evento del Fab13, ya en su tercer día.
Comienzo el día con la charla Innovation through play de Ola. Ola tiene una experiencia interesante y trabajó para la compañía LEGO y ahora sigue por su cuenta y está formando su propia compañía.
Actualmente ha explorado con varias cosas como por ejemplo con la cubierta de embutidos (si, la tripa que envuelve las salchichas o cecinas). Otro proyecto que hizo fue Build and Destroy y la idea era construir castillos para luego destruirlos con una catapulta. Y su trabajo en Fabacademy es una escultura interactiva de un perrito, con sensores y actuadores, la idea es que cuando lo acaricias mueve la cola y sus ojos.
Para ir cerrando la mañana está el panel sobre la creación de nuevas economías, de cómo obtener ganancias pero al mismo tiempo ayudar a la comunidad, integrar el concepto de los Fab Lab. Integrar crowdfundings con beneficios sociales también.
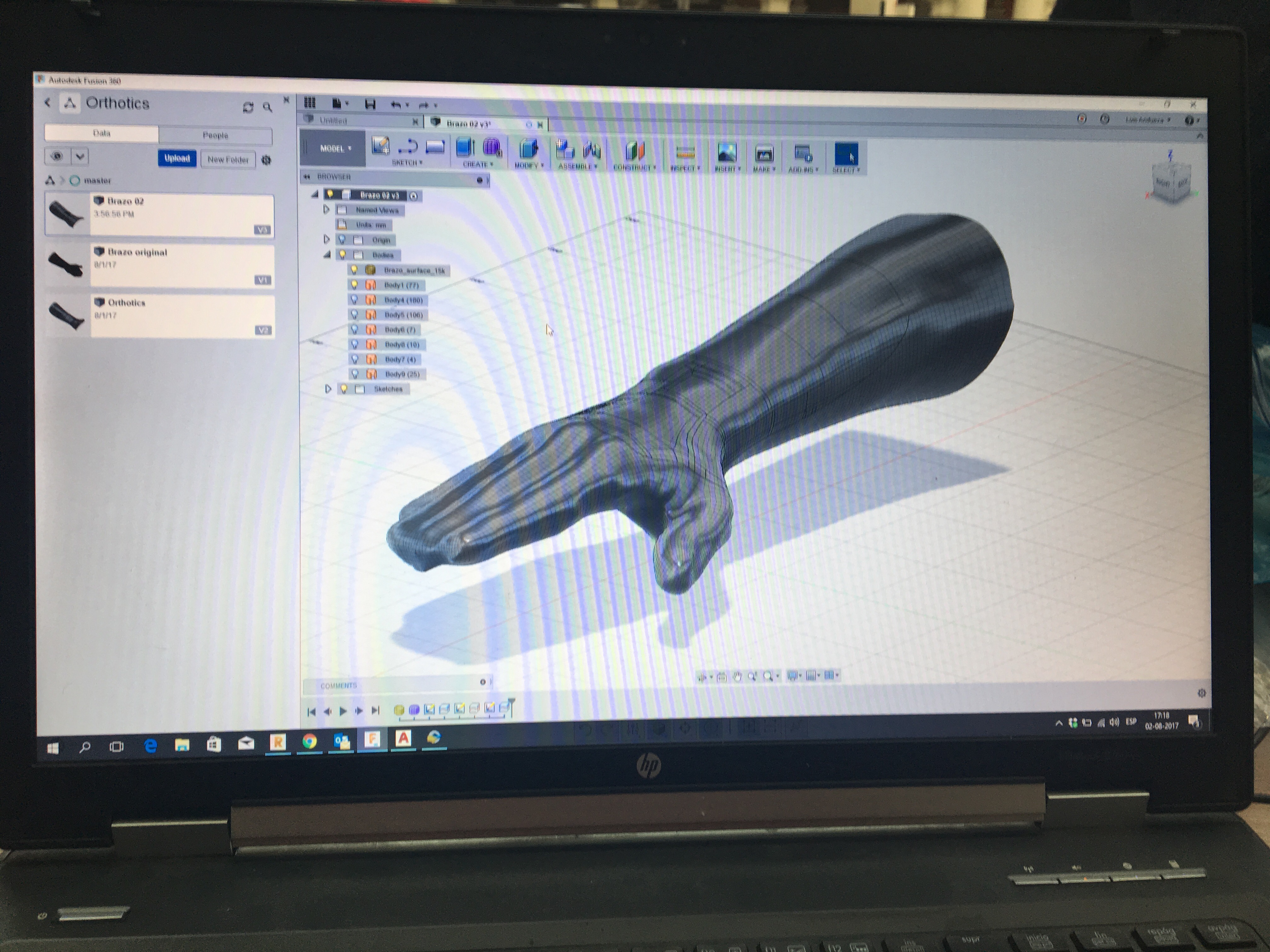
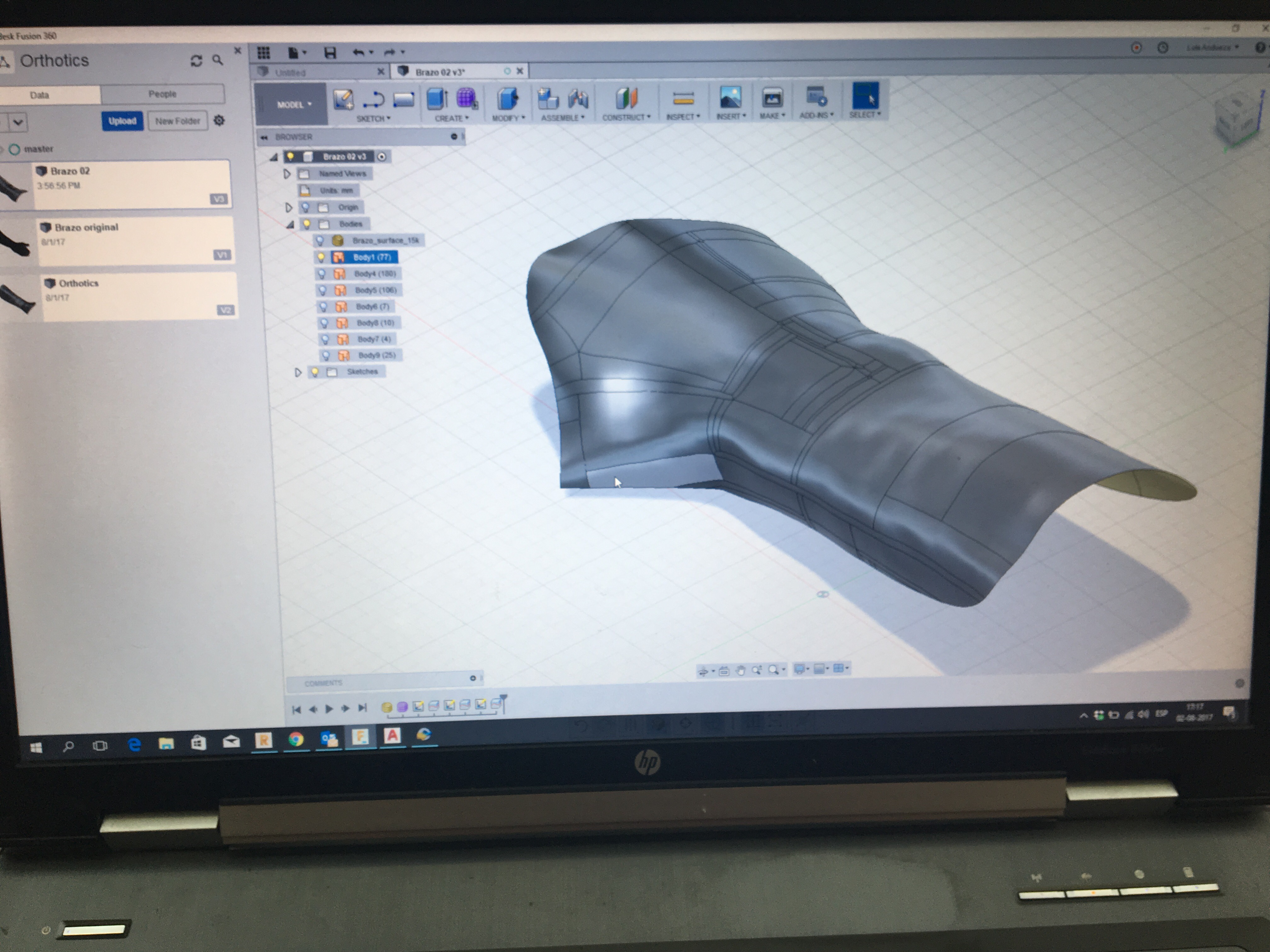
Luego por la tarde seguimos con el workshops de MyOrthotics, y continuamos arreglando nuestro modelo digital de la mano hasta que logramos la superficie de apoyo para los motores.
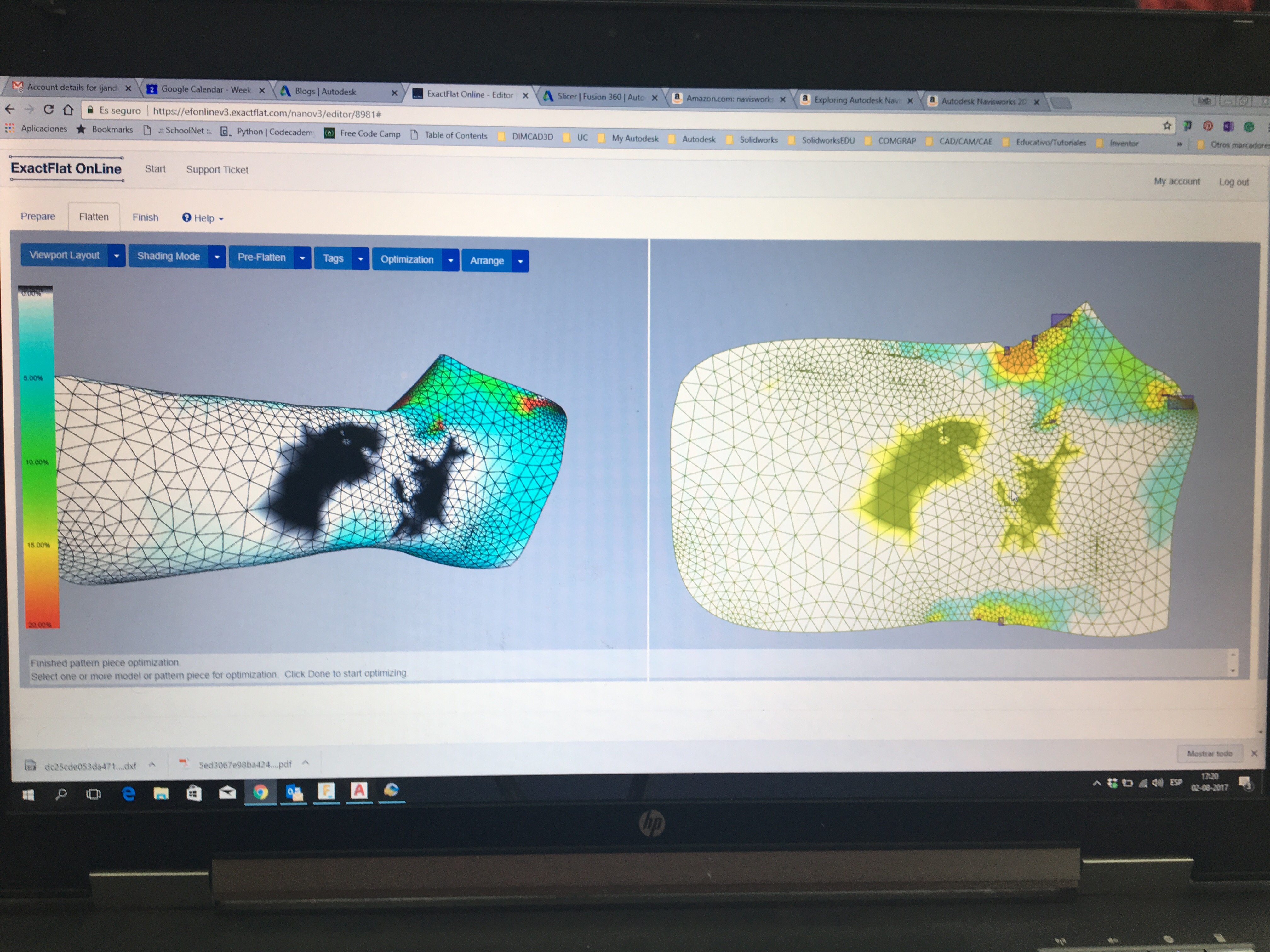
Una vez que tenemos la superficie, la exportamos en formato STL al programa ExactFlat para que nos de el despliegue de la misma.
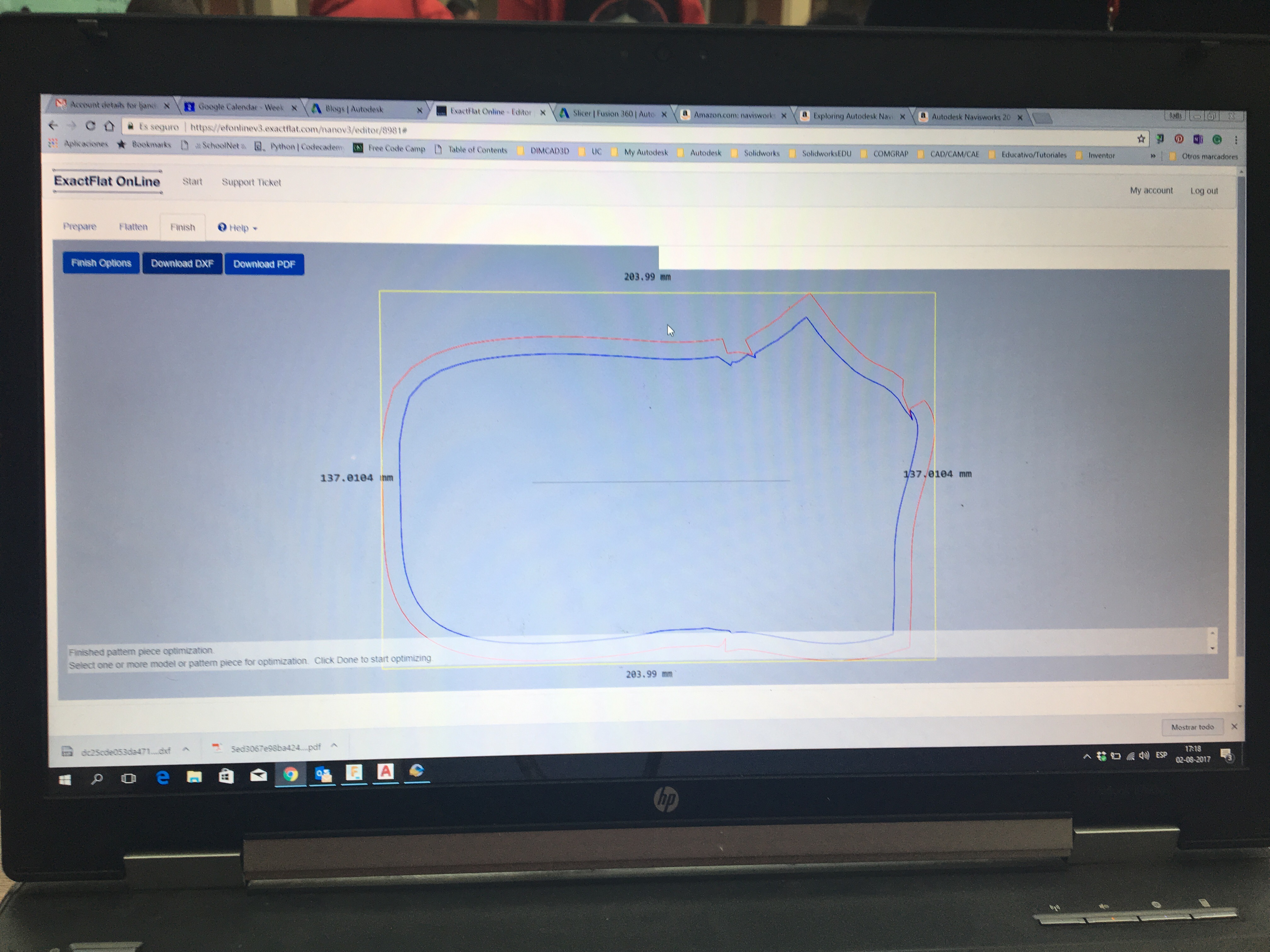
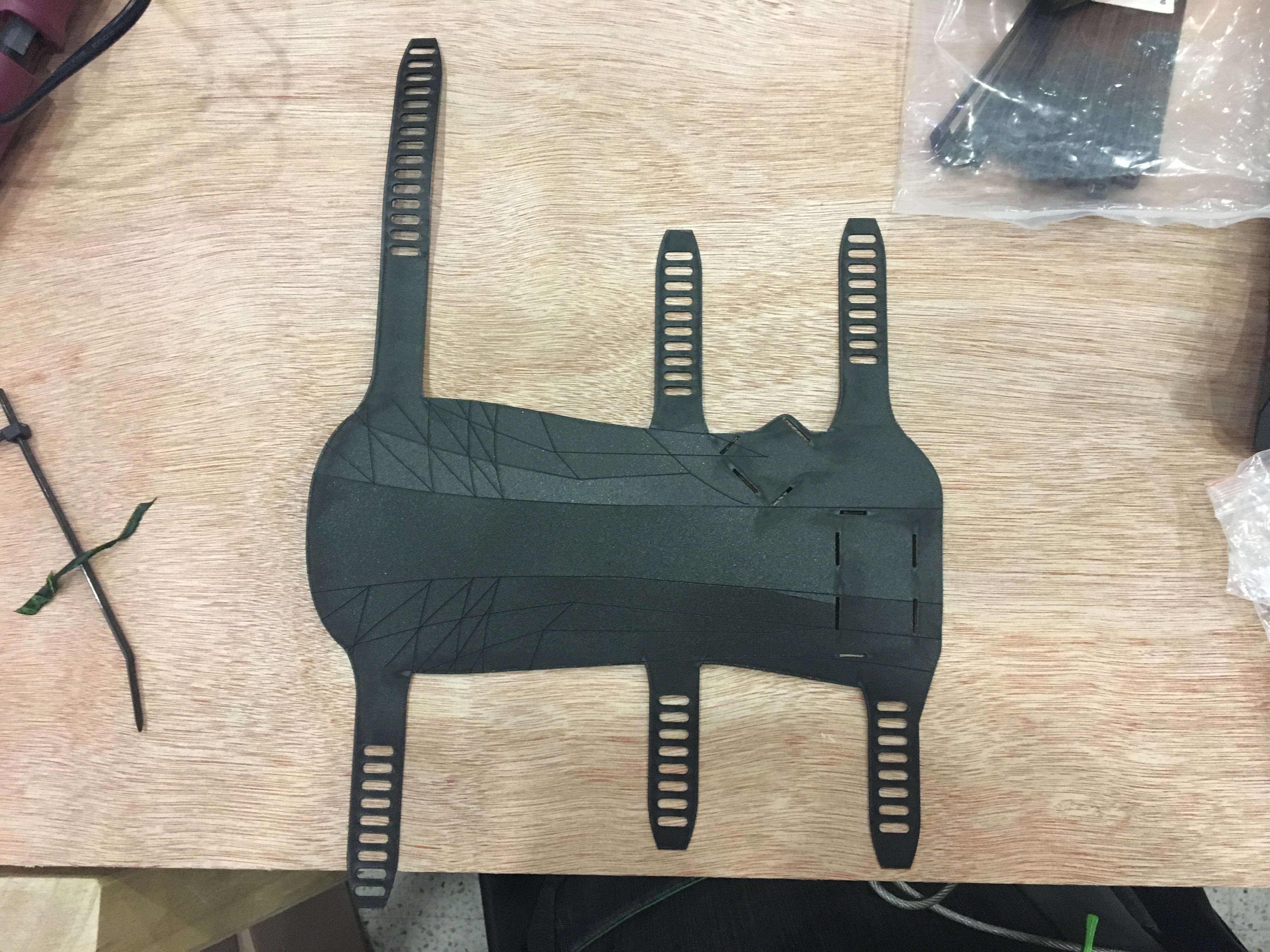
Y una vez que tenemos el despliegue lo exportamos en formato PDF y se trabaja en Illustrator para agregar las correas de sujeción. Y de allí a la cortadora láser. Para la pieza se utiliza una lámina de polipropileno

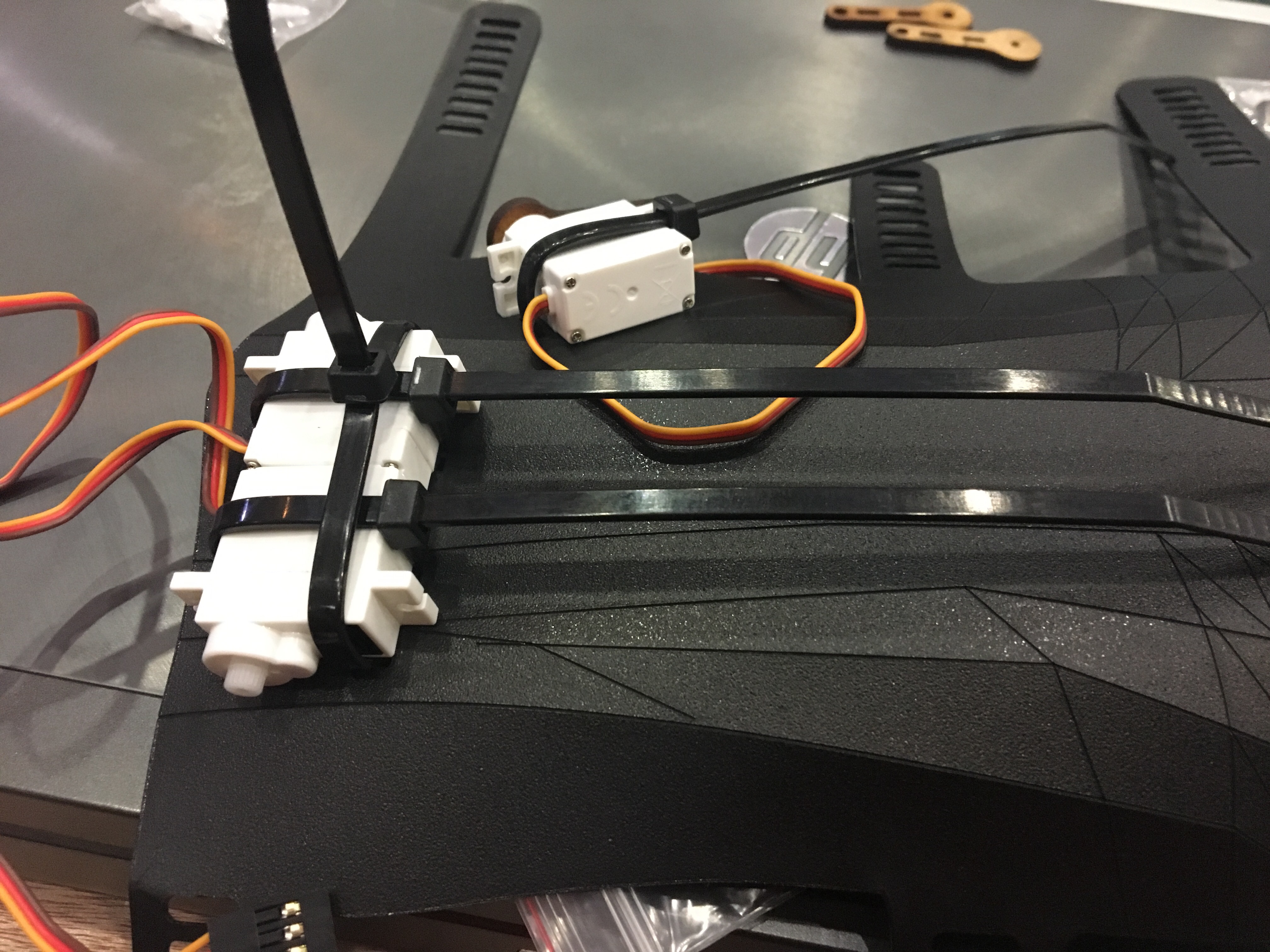
Una vez que tenemos el soporte para los materiales es hora de comenzar a ensamblar los motores.
Bueno, hasta aquí llegamos el día de hoy. Ya mañana terminaremos de completar el mecanismo y conectaremos los circuitos para terminar.
Saludos y hasta mañana.
Deja una respuesta